소개( Introduction )
이 안내서의 목적은 Waspmote에 사용자를 실제적인 방법으로 소개하는 것입니다.
Waspmote는 복잡한 장치이며 학습 과정을 완료해야합니다. Libelium은 개발자에게 도움이 되는 많은 가이드와 예제를 제공합니다.
현재 가이드는 Waspmote의 첫 단계에서 개발자를 돕기 위해 만들어졌습니다. 사용자가 학습 과정을 시작하고자 할 때이 지침을 따르도록 조언합니다. 마지막 장에서는 학습 과정을 계획하고 추가 단계를 제안합니다.
일반 및 안전정보( General and safety information )
Software
- Waspmote IDE 만 사용하여 업로드하십시오. 다른 IDE를 사용하면 Waspmote가 손상되어 응답하지 않을 수 있습니다. 이 사용은 보증 범위에 포함되지 않습니다.
- 코드를 업로드하는 동안 모든 커넥터를 분리하지 마십시오. Waspmote가 응답하지 않을 수 있습니다. 이 사용은 보증 범위에 포함되지 않습니다.
- Waspmote가 켜져있는 동안 커넥터를 연결하거나 분리하지 마십시오. Waspmote가 불안정하거나 응답하지 않아 내부 부품이 손상 될 수 있습니다. 이 사실은 보증 범위에 포함되지 않습니다.
Hardware
- Waspmote를 액체에 담그지 마십시오.
- 충격 또는 큰 진동에 노출 될 수있는 장소 또는 장비에 노드를 두지 마십시오.
- Waspmote를 -10ºC 이하 또는 50ºC 이상의 온도에 노출시키지 마십시오.
- Libelium이 제공 한 원본과 다른 전원으로 Waspmote에 전원을 공급하지 마십시오. 전압 및 전류 최대 정격을 초과하여 Waspmote가 작동하고 보증이 무효화 될 수 있습니다.
- 솔라 패널 커넥터에 센서를 연결하지 말고 솔라 패널을 센서 커넥터에 연결하지 마십시오. Waspmote가 손상되어 보증이 무효화 될 수 있습니다.
- Libelium에서 제공하지 않은 센서를 연결하지 마십시오.
- Waspmote를 물이 장치에 닿을 수있는 곳에 두지 마십시오.
- 자세한 정보 : http://www.libelium.com
- 비 충전식 배터리를 재충전하려고 시도하지 마십시오. 폭발을 일으켜 부상을 초래하고 장비를 파손시킬 수 있습니다. 비 충전식 배터리는 USB 케이블을 통해 연결해야하며 배터리는 연결하지 않아야합니다. USB를 연결하기 전에이 조건을 두 번 확인하십시오. 부상 당할 수 있고 장비를 파손시킬 수 있으므로 비 충전식 배터리가 장착 된 장치에 태양 광 패널이 연결된 상태로 연결하지 마십시오.
Waspmote's Hardware Setup
하드웨어 구성에 대한 다음 기본 사항을 확인하십시오.
Batteries
배터리를 Waspmote에 연결하십시오. Waspmote를 사용하기 전에 적어도 24 시간 동안 배터리를 충전해야한다는 것을 기억하십시오.

비 충전식 배터리를 재충전하려고 시도하지 마십시오. 폭발을 일으켜 부상을 초래하고 장비를 파손시킬 수 있습니다. 비 충전식 배터리는 USB 케이블을 통해 연결해야하며 배터리는 연결하지 않아야합니다. USB를 연결하기 전에이 조건을 두 번 확인하십시오. 부상 당할 수 있고 장비를 파손시킬 수 있으므로 비 충전식 배터리가 장착 된 장치에 태양 광 패널이 연결된 상태로 연결하지 마십시오.
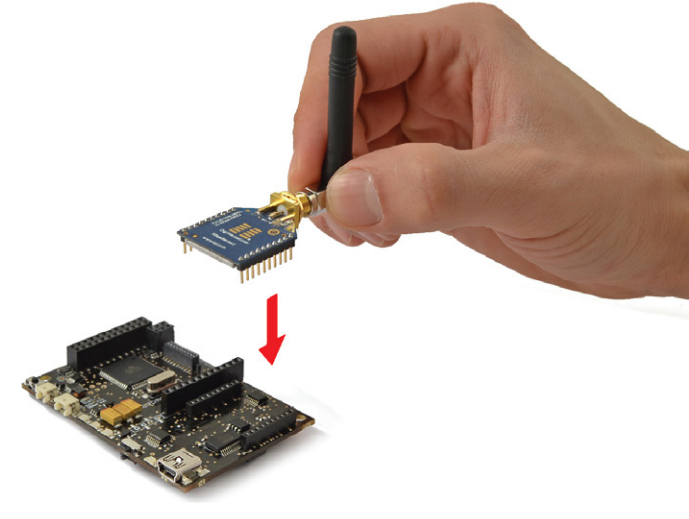
Antennas
안테나를 필요한 모듈에 연결하십시오.

Modules
Waspmote의 해당 소켓에 사용할 모듈을 놓습니다.
Sensor Boards
Waspmote에서 사용할 센서 보드를 놓습니다.

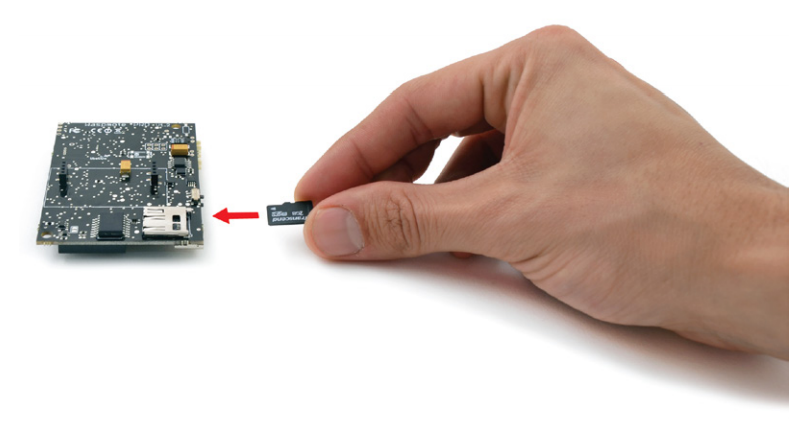
SD card
Waspmote에 SD 카드를 삽입하십시오.
Waspmote IDE : 다운로드 및 설치( Waspmote IDE: Download and Installation )
첫 번째 단계는 Waspmote를 프로그래밍하는 데 사용되는 Waspmote-IDE (통합 개발 환경)를 설치하는 것입니다. 이 IDE는 다음에서 찾을 수 있습니다.
http://www.libelium.com/development/waspmote
Linux
Waspmote를 올바르게 컴파일하고 사용하려면 Atmel 마이크로 컨트롤러 및 Java 환경 용 컴파일러 버전과 관련된 일부 패킷을 설치해야합니다.
a) Java 설치
첫 번째 단계는 필요한 Java 환경 버전을 설치하는 것입니다. Synaptic 패키지 관리자나 터미널을 사용할 수 있습니다.
Synaptic 패키지 관리자를 사용하여 "sun-java6-jre"패키지를 찾아 설치해야합니다.
터미널을 사용하여 다음과 같은 방법으로 apt-get 명령을 사용해야합니다.
sudo apt-get install sun-java6-jreb) AVR-GCC 컴파일러 설치
다음 단계는 Waspmote ATMEGA 1281 마이크로 컨트롤러를 프로그래밍 할 수 있도록 필요한 버전의 avr-gcc 컴파일러를 설치하는 것입니다. Synaptic 패키지 관리자 나 터미널을 사용할 수 있습니다.
시냅틱을 사용하여 "gcc-avr"패키지를 찾아서 설치해야합니다. 터미널을 사용하여 다음과 같은 방법으로 apt-get 명령을 사용해야합니다.
sudo apt-get install gcc-avr
c) lib-avc 라이브러리 설치하기
다음 단계는 필요한 버전의 lib-avc 라이브러리를 설치하는 것입니다. Synaptic 패키지 관리자 나 터미널을 사용할 수 있습니다. Synaptic을 사용하여 "lib-avc"패키지를 찾아 설치해야합니다. 터미널을 사용하여 다음과 같은 방법으로 apt-get 명령을 사용해야합니다.
sudo apt-get install avr-libc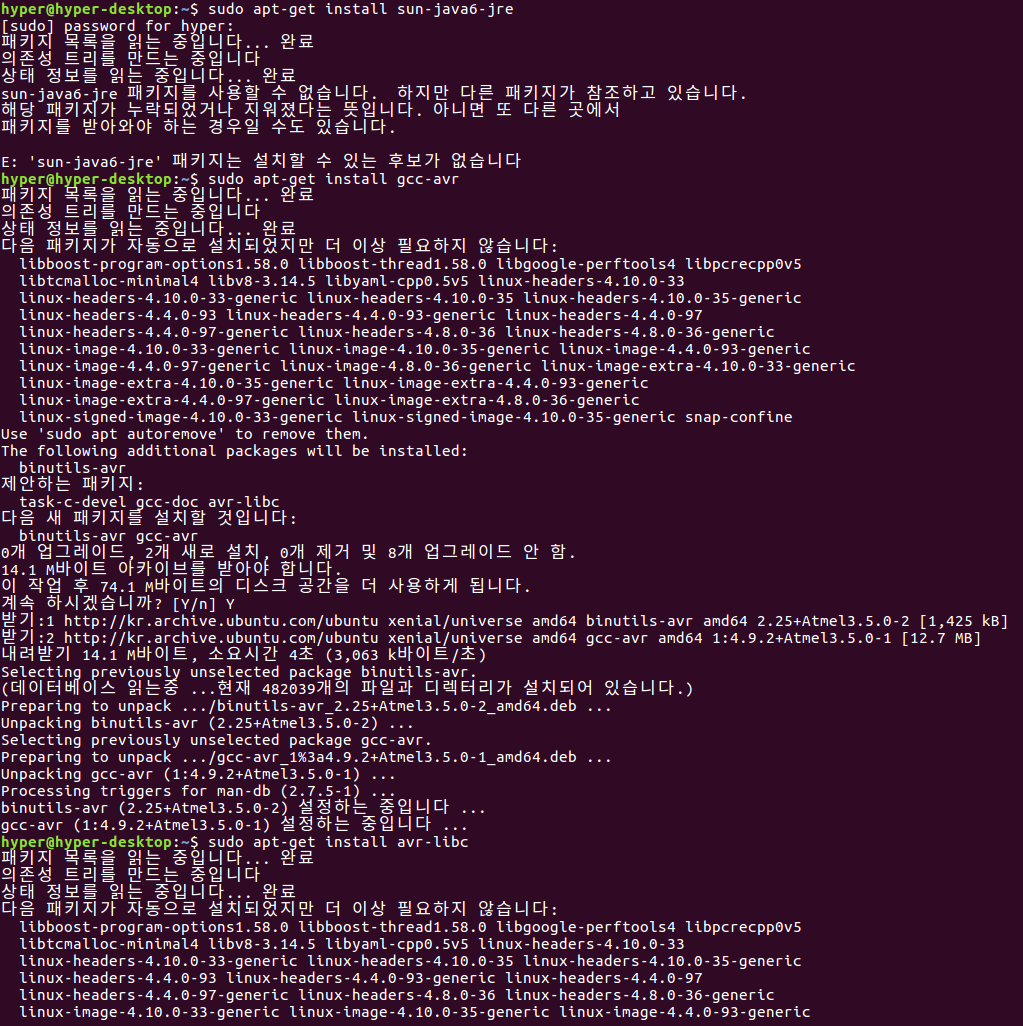
d) Waspmote IDE 실행
Waspmote 설치는 이전 단계에서 다운로드 한 파일을 선택한 폴더로 압축 해제합니다. 다운로드 한 파일의 압축을 풀면 Waspmote라는 파일을 실행하여 IDE를 시작해야합니다.
Windows
a) Waspmote 설치
다음 단계는 다운로드 한 파일을 선택한 폴더에 압축을 해제하는 것입니다. 이 폴더에는 다음 단계에서 필요한 드라이버가 포함되어 있습니다. USB 및 FTDI 변환기를 설치하십시오.
b) Waspmote 보드 연결하기
미니 USB 커넥터를 사용하여 Waspmote 보드를 연결하면 "새 장치를 찾았습니다"라는 메시지가 나타납니다. 창은 이 장치를 설치하려면 엽니다.
"Not right now"옵션을 선택하고 'Next'버튼을 누릅니다.
다음으로 FTDI 변환기의 드라이버가있는 경로를 선택하십시오. 이 드라이버는 Waspmote가 압축 해제 된 폴더에 있습니다.
그런 다음 FTDI 변환기 드라이버 설치로 진행하십시오. 완료되면 다음 메시지가 표시됩니다.
설치가 완료되면 USB를 참조하여 '새 장치를 찾았습니다'라는 메시지가 나타납니다. 같은 과정이 모든 창에서 동일한 옵션을 선택하면 FTDI 변환기를 따라야합니다. 드라이버의 경로는 다음과 같습니다.
이전에 지정된 이 설치가 끝나면 USB가 올바르게 설치되었다는 메시지가 나타납니다.
두 장치가 모두 올바르게 설치되면, Waspmote 보드가 설치된 포트가 "장치 관리자"에 나타납니다.
Mac
a) Waspmote 설치
다음 단계는 다운로드 한 파일을 선택한 폴더에 압축을 해제하는 것입니다. 다음 단계에서 FTDI 변환기를 설치하는 데 필요한 드라이버가이 폴더에 있습니다.
b) FTDI 변환기 드라이버 설치
Waspmote는 FTDI 변환기 드라이버를 설치해야합니다. 이 드라이버는 다운로드 한 파일에서 찾을 수 있습니다.
FTDI 변환기 용 드라이버가 설치되면 Waspmote 보드를 연결할 수 있으며 시스템이 올바르게 인식합니다.
Waspmote에서 프레임 받기 ( Receiving Frames from Waspmote )
In waspmote Gateway
Waspmote는 장치의 올바른 작동을 점검 할 수있는 프로그램으로 공장에서 미리 구성됩니다. 이 프로그램은 표준 프레임을 게이트웨이로 보냅니다. wasp_pro_test_code.pde라고하며 IDE와이 링크에서 항상 사용할 수 있습니다.
http://www.libelium.com/development/waspmote/examples/waspmote-pro-test-code
이 프로그램은 다음 무선 모듈에 무선 프레임을 전송합니다.
- XBee 802.15.4
- XBee 868MHz
- XBee 900MHz
- XBee Digimesh
- XBee ZigBee
- LoRa
다른 모듈의 경우 프로그램이 작동하지만 USB를 통해 프레임을 보내도록 연결이 제한됩니다.
단계 :
1. 드라이버 및 직렬 모니터 소프트웨어를 컴퓨터에 설치하십시오.
2. 안테나와 원하는 나머지 구성 요소를 Waspmote 및 Waspmote 게이트웨이에 연결하십시오.
3. Waspmote 게이트웨이를 컴퓨터의 USB 포트에 연결하십시오.
4. 직렬 모니터 응용 프로그램을 시작하고 다음 매개 변수를 설정하십시오.
- USB port: 115200bps
- 8 bits
- 1 bit stop
- 패리티 없음( no parity setting )
5. 배터리를 Waspmotes에 연결하십시오.
6. Waspmotes를 ON 위치로 전환하십시오.
프로그램이 시작되면 다음 작업을 순차적으로 실행합니다.
- 상태 1 - 5 초 동안 LED가 켜짐
- 상태 2 - 3 초 동안 LED가 깜박입니다.
- 상태 3 - 메시지 보내기
상태 1과 2는 한 번만 (프로그램이 시작될 때) 실행되며 상태 3은 매초마다 무한 반복됩니다. (Waspmote를 재설정하면 프로그램이 다시 시작됩니다)
모든 패킷에는 Waspmote 데이터 프레임 형식의 센서 데이터가 포함 된 메시지가 포함되어 있습니다. 프레임에 추가 된 센서 필드는 가속도계 값, RTC 내부 온도 값 및 배터리 수준입니다. XBee가 DigiMesh 프로토콜을 사용하지 않는 경우 길이 제한 때문에 MAC 주소가 추가됩니다. 자세한 내용은 Waspmote 데이터 프레임을 확인하십시오.
가이드: http://www.libelium.com/development/waspmote/documentation/?cat=programming
예:
~\0x00I\0x90\0x00}3\0xa2\0x00@z\0xcb\0x92\0xd8\0xd3\0x02<=>\0x80\0x03#35689722##7#ACC:80;10 ;987#IN_TEMP:22.50#BAT:93#\0xb4
초기에는 프레임 헤더에 속한 몇 가지 16 진수 문자가 있으며 그 뒤에 메시지가옵니다. 위의 예에서 메시지는 다음과 같습니다.
<=>\0x80\0x03#35689722##7#ACC:80;10;987#IN_TEMP:22.50#BAT:93#
In Meshlium
Meshlium과 Waspmote가 포함 된 키트를 구입하면 Waspmtes가 이미 프레임을 게이트웨이로 보내도록 구성됩니다. 나중에 사용자가 게이트웨이로 전송하기위한 코드를 개발하면 그는 Meshlium으로 전환 할 수 있습니다.
Meshlium으로 프레임을 전송하기 전에 모듈에 대한 네트워킹 가이드를 읽고 공부하는 것이 좋습니다.
- Waspmote 802.15.4 Networking Guide
- Waspmote 868MHz Networking Guide
- Waspmote 900MHz Networking Guide
- Waspmote Digimesh Networking Guide
- Waspmote ZigBee Networking Guide Waspmote LoRa Networking Guide
- Waspmote WiFi Networking Guide
- Waspmote 3G+GPS Networking Guide
- Waspmote GPRS Pro Networking Guide
- Waspmote GPRS+GPS Networking Guide
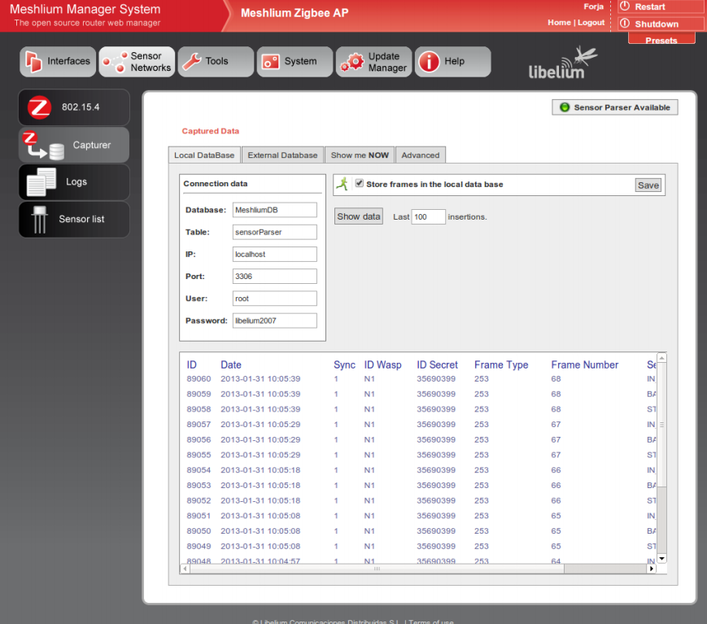
Meshlium은 무선 모듈을 사용하여 Waspmote가 전송 한 센서 데이터를 수신하고 프레임을 로컬 데이터베이스에 저장합니다. 이는 Sensor Parser 덕분에 자동으로 수행 할 수 있습니다.
Sensor Parser는 Meshlium (3.0.5 버전 이상)의 기능입니다. 다음과 같은 작업을 수행 할 수있는 소프트웨어 시스템입니다. 쉽고 투명한 방식으로 다음 작업을 수행 할 수있는 소프트웨어 시스템입니다.
- XBee / LoRa / WiFi / 3G / GPRS에서 프레임 수신 (데이터 프레임 형식 사용)
- 이 프레임을 구문 분석합니다.
- 로컬 데이터베이스에 데이터 저장
- 로컬 데이터베이스를 외부 데이터베이스와 동기화합니다.
게다가, 사용자는 자신의 센서를 추가 할 수 있습니다.
새로운 프로그램 컴파일하기( Compiling a New Program )
Waspmote-IDE 컴파일러를 사용하려면 컴파일러가 설치된 폴더에 'Waspmote'라는 실행 가능 스크립트를 실행해야 합니다.
Waspmote는 다음 그림에서 볼 수있는 4 가지 주요 부분으로 나뉩니다.
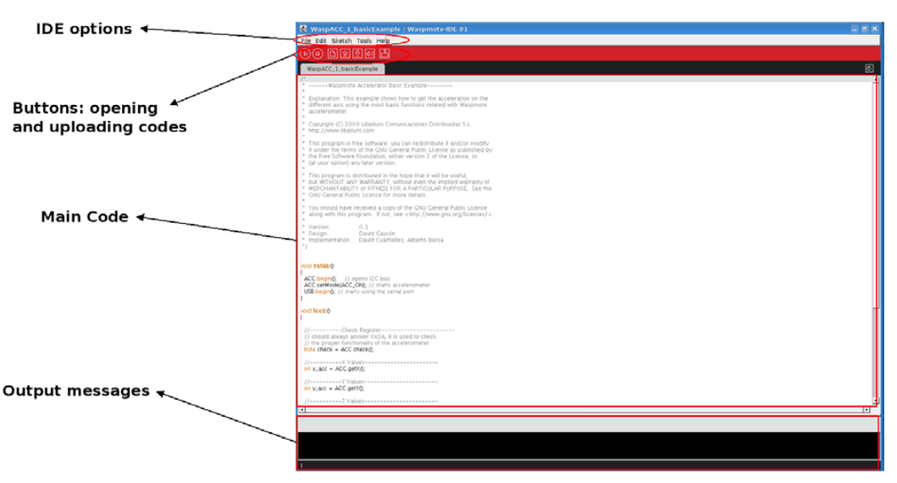
- 첫 번째 부분은 선택한 직렬 포트와 같은 일반 매개변수를 구성 할 수 있는 메뉴입니다.
- 두 번째 부분은 선택한 코드를 보드에서 확인, 열기, 저장 또는 로드할 수 있는 버튼 메뉴입니다.
- 세 번째 부분에는 Waspmote에 로드될 주 코드가 들어 있습니다.
- 네 번째 부분은 프로세스가 올바르게 수행되면 성공 메시지 뿐 만 아니라 가능한 컴파일 및 로드 오류를 보여줍니다.
Waspmote-IDE 버튼 패널은 이전에 저장된 코드를 열거 나 새 코드를 만들거나 보드에 코드를 로드하는 것과 같은 특정 기능을 수행 할 수있게합니다. 다음 그림은 패널과 각 버튼의 기능을 보여줍니다.

일단 프로그램이 올바르게 열리면 Waspmote에서 프로그램이 올바르게 로드되도록 구성을 변경해야합니다.
Tools > Board 탭에서 Waspmote 보드를 선택해야합니다. 선택한 API를 나타냅니다.

Tools > Serial Port 탭에서 Waspmote가 컴퓨터에 연결된 USB를 선택해야합니다.

이 두 매개 변수가 구성되면 Waspmote에 프로그램을로드 할 수 있습니다. 이 과정은 아주 간단한 예를 사용하여 설명합니다. Waspmote 환경을 배우고 익히기위한 일련의 예제가 컴파일러가 포함 된 다운로드 파일에 포함되어 있습니다.
가장 간단한 예제는 'test.pde'라는 파일입니다. 이 예제에서 텍스트 문자열 "Hello World!"가 화면에 나타납니다. 예제는 Waspmote에 프로그램을로드하는 방법과 화면에 정보를 표시하는 방법을 보여줍니다.
다음 단계는 생성 된 프로그램이 저장 될 폴더를 구성하는 것입니다. Waspmote-IDE에서이 폴더는 'sketchbook'이라고 불리며 'File/Preferences'탭에 액세스하여 구성 할 수 있습니다. 이 탭을 클릭하면 스케치북의 위치를 표시 할 수있는 새 창이 열립니다. 스케치북 폴더 경로가 표시되면 다운로드 한 테스트 프로그램을이 폴더에 저장해야합니다.
Waspmote-IDE는 스케치북 폴더의 변경 사항과 새로 저장된 프로그램이 반영되도록 닫아야합니다.
Waspmote를 다시 실행하고 'Open'를 클릭하여 다운로드 한 테스트 프로그램을 엽니 다.
압축이 풀린 경로에서 'test.pde'파일을 선택하여 엽니 다. 보시다시피, 이것은 3 초마다 LED를 켜고 화면에 "Hello World!"라고 쓰는 아주 간단한 코드입니다.
다음 단계는 Waspmote에 프로그램을 로드하는 것입니다. 이렇게하려면 Waspmote가 USB를 통해 컴퓨터에 연결되어 있어야하며 'upload'버튼을 클릭해야합니다. 그런 다음 프로그램 컴파일을 시작합니다. 프로그램이 올바르게 컴파일되면이 이벤트를 나타내는 창의 아래 부분에 메시지가 나타납니다. 반대로, 오류가 발생하면 코드에 버그를 나타내는 빨간색 메시지가 나타납니다. 컴파일이 끝나면 코드가 Waspmote에로드됩니다.
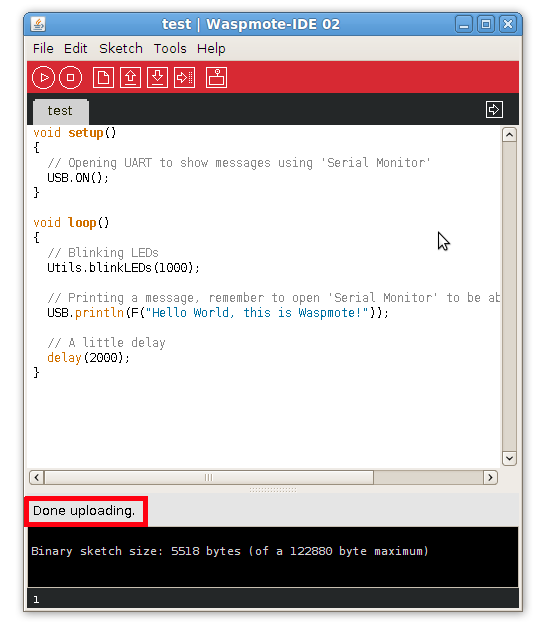
프로그램이 올바르게로드되면 Waspmote 창에 'Done Uploading'이라는 메시지가 나타납니다.
반대로 로드하는 동안 문제가 발생하면 오류를 나타내는 빨간색 메시지가 나타납니다.
이 프로그램이 보드에 로드되면 로드된 코드가 아키텍처 및 시스템 장에서 설명한대로 실행됩니다.
참고 : 게이트웨이는 단지 UART-USB 브리지입니다. 즉, 게이트웨이를 프로그래밍 할 수 없으며 코드를 업로드 할 수 없습니다. 이 기능은 XBee 또는 LoRa 모듈에서 USB로 데이터를 전달하거나 그 반대로 데이터를 전달하는 것입니다.
Waspmote에 새 프로그램 업로드( Uploading a New Program to Waspmote )
코드를 업로드해야 할 때마다 항상 다음 단계를 수행해야 합니다.
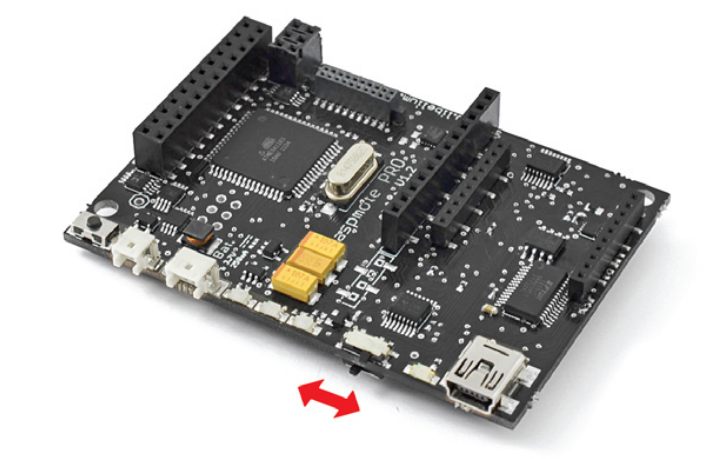
1단계
Waspmote를 켜십시오. (이미지에서 스위치를 왼쪽으로 이동하십시오)
2단계
Waspmote를 USB 케이블을 통해 PC에 연결하십시오. Waspmote의 IDE를 열고 "Tools"메뉴에서 적절한 보드 및 직렬 포트를 선택하십시오.


3단계
Waspmote에 대한 코드를 준비합니다. 여기서는 "hello_world"템플릿으로 이동하거나 스케치에 텍스트를 복사하여 붙여 넣습니다.
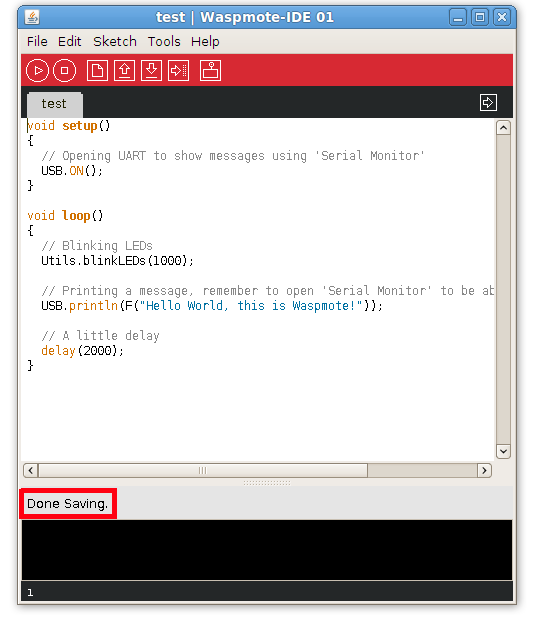
4단계
"hello_world"라는 이름으로 스케치를 저장하고 IDE에 "Done Saving"을 확인합니다.
5단계
코드를 컴파일하고 (IDE에 버튼이 있습니다) 오류나 경고가 없는지 확인하십시오. IDE는 "Done Compiling"이라고 말해야합니다.
6단계
Waspmote에 코드 업로드 : "업로드"버튼을 클릭하고 프로세스가 끝날 때까지 몇 초 기다리십시오. 거기에 오류 메시지가 없다는 "Done uploading" 와 같은 메시지를 확인하십시오.

개발자 가이드 사용 방법( How to Use the Developer's Guides )
축하합니다. 여기에 도착했다면 퀵 스타트 가이드를 완료했고 Waspmote에 대한 기본 사항을 알았습니다.
다음 단계는 개발하려는 프로젝트의 종류에 따라 다릅니다. 일반적으로 Waspmote 용 프로그램은 4 부분으로 구성됩니다.
1. 구성 (RTC, 센서, 통신 모듈)
2. 판독 센서 (들)
3. 통신 (XBee, LoRa, WiFi, GPRS, ...)
4. 절전 모드로 들어갑니다.
첫 단계로 Waspmote 기술 가이드를 읽어야 합니다. Waspmote는 모든 기능, 모듈 및 보드에 대해 이야기하기 때문에 좋은 소개입니다. 철저하게 사용해야 하는 기능에 대한 장을 읽어야합니다.
RTC 관리 또는 전원/절전 기능은 거의 모든 유형의 프로젝트에 있어야하므로 시작하는 것이 좋습니다. 게다가, 그들은 제어하기가 꽤 쉽습니다. RTC 가이드와 전원 가이드를 주의 깊게 읽어야합니다. 모든 기능, 모듈 또는 보드에는 많은 예제가 있으며 관련 가이드를 읽는 동안 Waspmote에서 예제를 실행해야합니다. 이것은 일을 정리하는 데 도움이 되며 독서 뿐 만 아니라 수행함으로써 개념을 배울 수 있습니다. 어떤 경우든, 예제는 난이도가 높아지는 순서로 배열됩니다. 즉, 하위 예제부터 시작하여 고급 예제로 이동해야 합니다.
센서를 읽는 것도 쉽고 첫 번째 단계 중 하나여야 합니다. 해당 센서 안내서를 읽은 다음 관련 예제를 실행할 수 있습니다.
SD, 가속도계, EEPROM 등을 사용할 계획이라면 지금 공부해야하는 옵션 기능이나 모듈이 있습니다.
가장 어려운 부분 일 수 있으므로 마지막 단계를 위해 통신 부분을 남겨 두는 것이 좋습니다. 그 순간까지는 개발의 첫 단계에 USB를 통해 데이터를 전송하는 것이 좋습니다. 필요한 만큼의 메시지를 인쇄 할 수 있으므로 유용한 중간 메시지를 인쇄 할 수 있습니다. 프레임에 대해 배워보십시오. 통신 모듈을 사용하여 공식 프레임 형식으로 프레임을 전송하는 것이 좋습니다.
일단 여기 도착하면 RTC, 전력, 센서 및 통신을 결합하여 첫 번째 완전한 프로그램을 수행 할 수 있습니다. 성공적인 방법으로 그것을 수행하는 방법을 보여주는 여러 가지 결합 된 예제가 있습니다.
프로젝트 개발을 진행하면서 프로그래밍 가이드를 읽는 것을 잊지 마십시오. 이 안내서는 실제 프로젝트에 유용한 원자 팁을 포함합니다. 여기에 나와있는 아이디어 중 일부는 성공적인 프로젝트를 구축하는 데 도움이됩니다.
게이트웨이가 항상 권장됩니다. 게이트웨이를 사용하여 프레임을 수신하는 것이 더 좋다고 생각합니다. 일단 편안함을 느끼면 Meshlium으로 전환 할 수 있습니다. Meshlium은 고급 게이트웨이로 볼 수 있습니다. Meshlium Quick Start Guide를 읽으면 시작할 수 있습니다. 그 후에는 완전한 Meshlium 기술 안내서를 학습 할 수 있습니다.
2개의 통신 라디오를 사용하려면 별도로 연구해야합니다. 그들의 첫 번째; 개발을 완료하면 2단계로 진행하십시오. 두 가지 사실을 모두 알고 나면 같은 프로그램에서 두 가지 방법을 시도 할 수 있습니다. 도움이 될 수있는 2개의 라디오가 결합 된 예가 있습니다.
중단은 하나의 고급 기능이므로 학습 과정의 마지막 단계에서 중단 할 수 있습니다.
OTA 기능이 필요한 경우 복잡한 기능이기도하므로 OTA 가이드를 읽고 예제를 실행하는 것이 좋습니다.
'기타' 카테고리의 다른 글
| Docker Local Registry 구축 (0) | 2019.12.11 |
|---|---|
| IPFS Tutorial: IPFS(InterPlanetary File System) 설치하기 (1) | 2019.02.27 |
| Waspmote ZigBee Networking Guide (0) | 2018.05.28 |
| Waspmote PRO v1.2 번역 및 실습 (0) | 2018.05.28 |
| Waspmote IDE User Guide (0) | 2018.05.28 |


